A binocular vision system has two eyes. In robotics domain, this means two cameras. An ideal binocular system should get visual input from both eyes at the same time, with 0 ms time difference. In other words, the triggers of the two cameras should be synchronized. 1
1 This is especially important when the scene being captured has dynamic or fast-moving objects.
Before talking about camera synchronization, we need to understand two ways of triggering a camera: software and hardware. The software trigger is straight-forward. Just as one could send an API command to adjust the exposure time, a trigger API will trigger a camera.
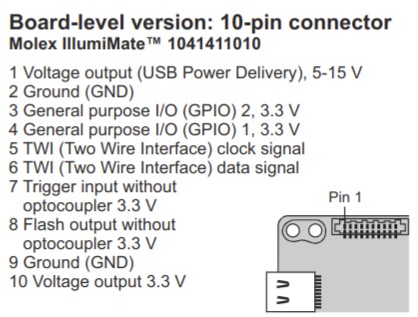
The hardware trigger is more advanced and not all cameras support it. A camera supporting hardware trigger has an additional interface than the typical USB socket. This interface (e.g. Figure 1) typically has multiple pins ready for input and/or output voltage signals. 2 One of the pins is responsible for trigger input. If you connect a wire to this pin and send in a voltage signal, it will trigger the camera. Another common pin is for flash output which can send out a voltage signal to an external flashlight.
2 I believed hardware trigger was named due to these voltage signals since they are very low-level.
Corresponding to software and hardware triggers, two types of synchronization exists. Again, software sync is simpler, which only requires calling trigger APIs as simultaneously as possible. As one can expect, software sync is not so precise (>10ms).
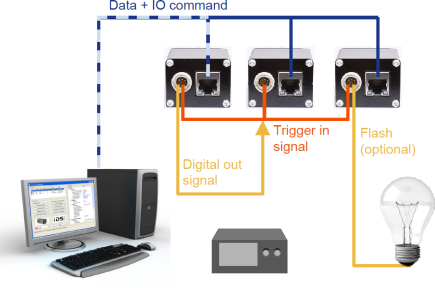
Hardware sync takes advantage of hardware triggers. Traditional hardware sync needs an extra device sending voltage signals to cameras’ hardware trigger pins. If, like me, you did not have this device, you could still use a nice trick involving the flash output pin to achieve hardware sync, called master/slave sync in this case. Here are the steps for wiring etc:
- Connect both cameras to computer via USB and set their trigger modes to hardware;
- Prepare three wires and choose one camera as the master;
- Connect one wire to the master’s flash output pin;
- Connect one wire to each camera’s trigger input pin;
- Connect or solder the other ends of the three wires.
As some might have guessed, now when you send a flash API command to the master camera, both cameras will be hardware triggered. I would leave to the readers why and how this worked.
Useful Documentations
https://en.ids-imaging.com/techtipp-details/items/app-note-synchronizing-image-acquisition.html
https://www.1stvision.com/cameras/IDS/IDS-manuals/uEye_Manual/hw_grundlagen_camerasync.html